Teleoperated Ground-Air Morphing Robot
Overview
This is a teleoperated transformer robot that can switch between flight and ground modes. I started with an F450 drone frame and designed a hinge mechanism on each arm: when the arms are straight, the robot flies as a quadcopter powered by brushless motors; when the arms fold down, it becomes a wheeled ground vehicle with wheels driven by mini servo motors. The folding itself is also actuated by servo motors.
Full System Architecture:
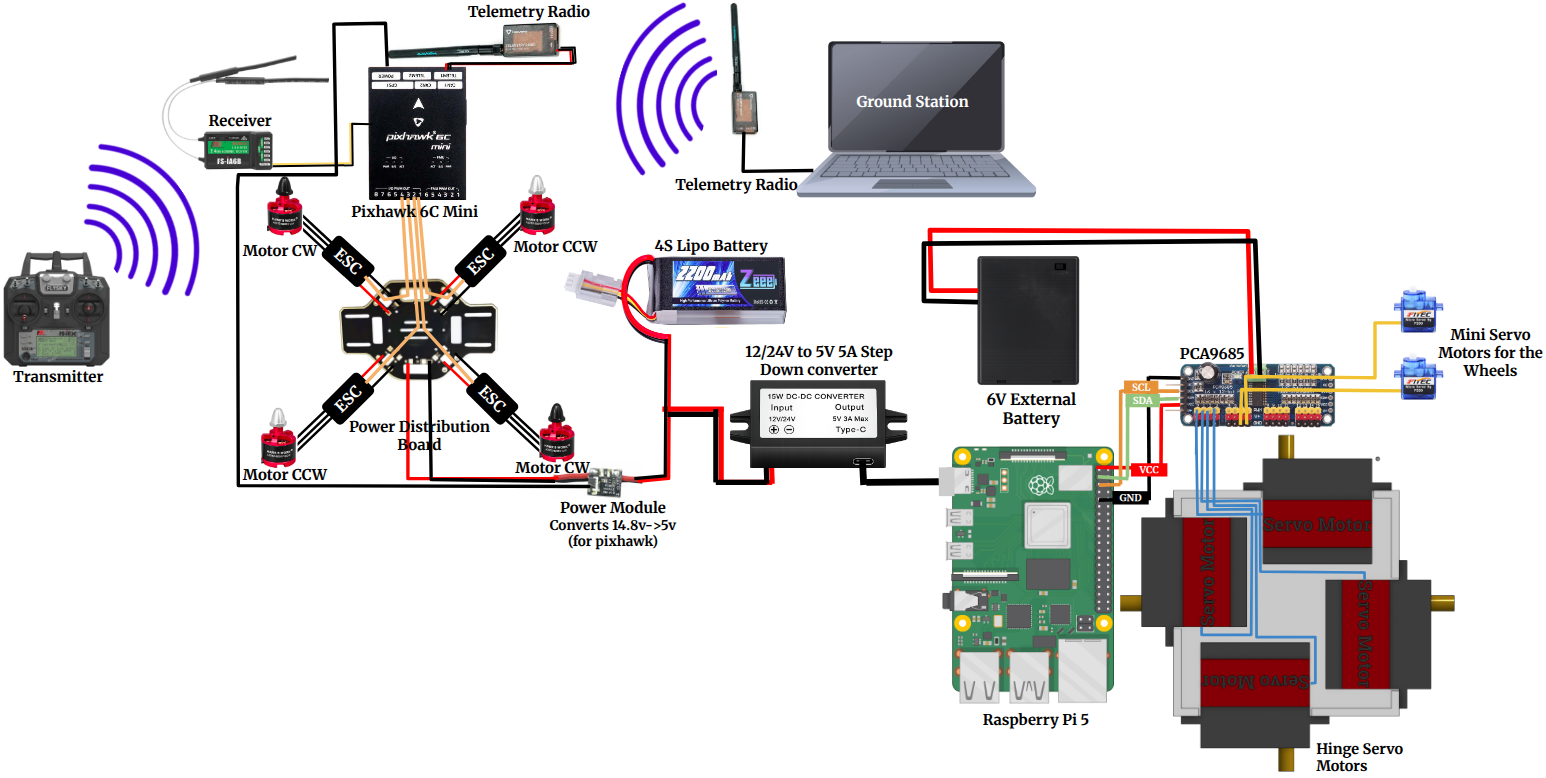
CAD Models:
Full Assembly

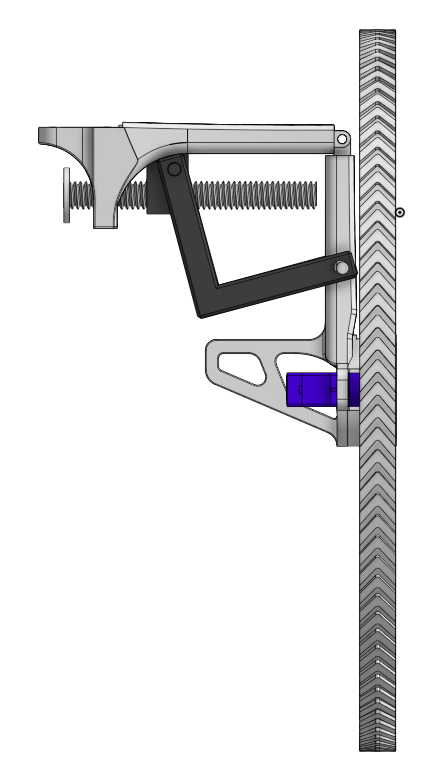
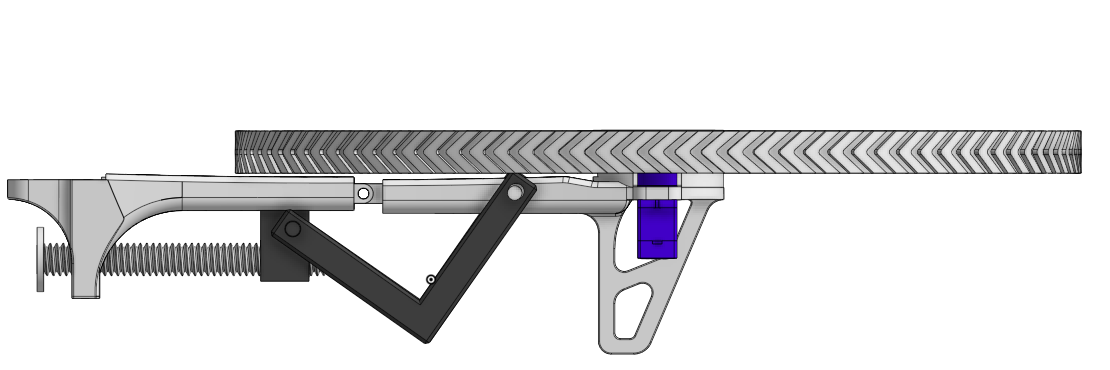
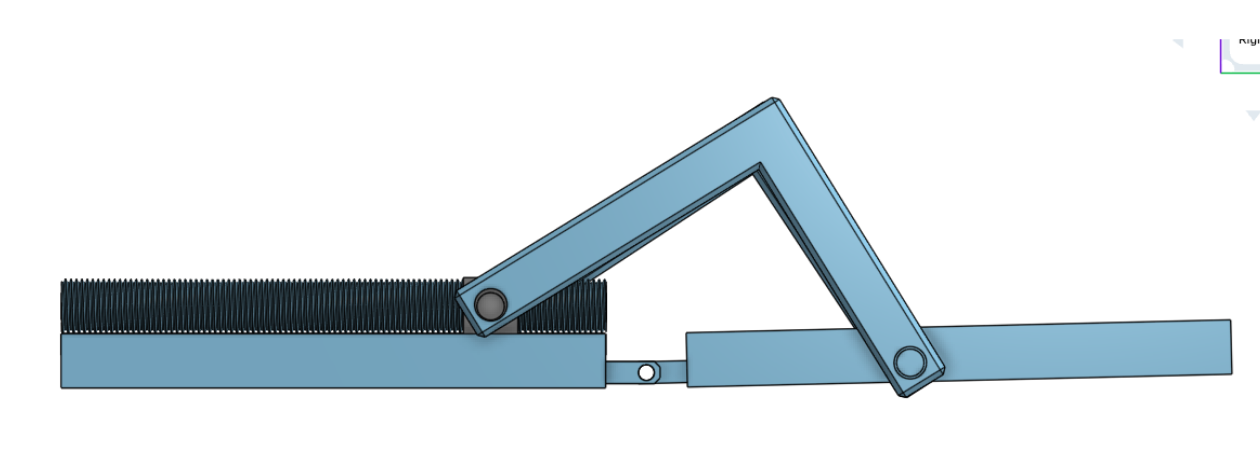
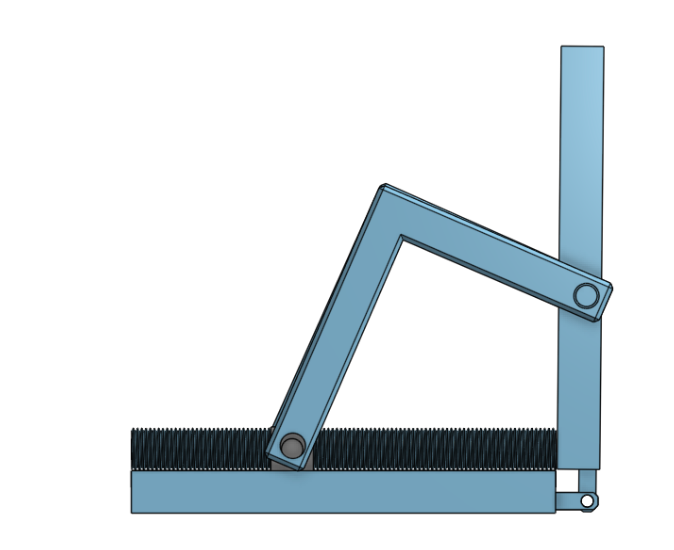
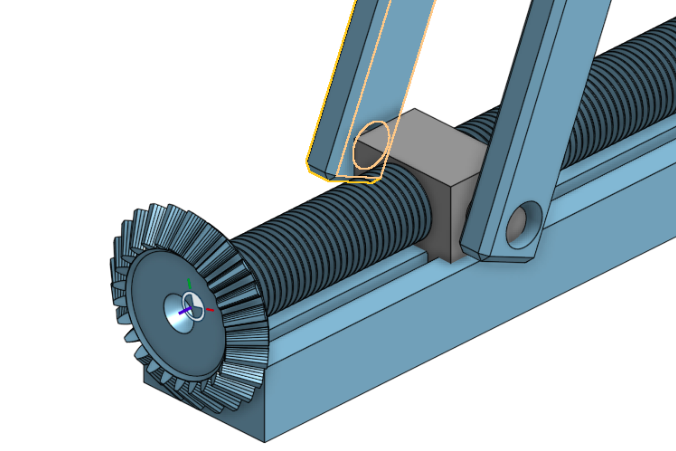
Hinge Mechanism
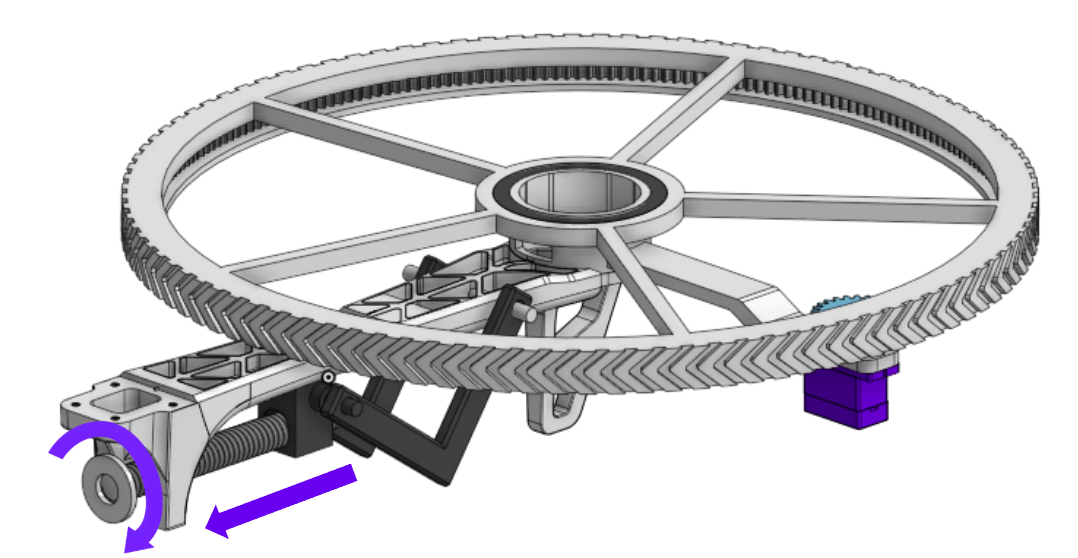
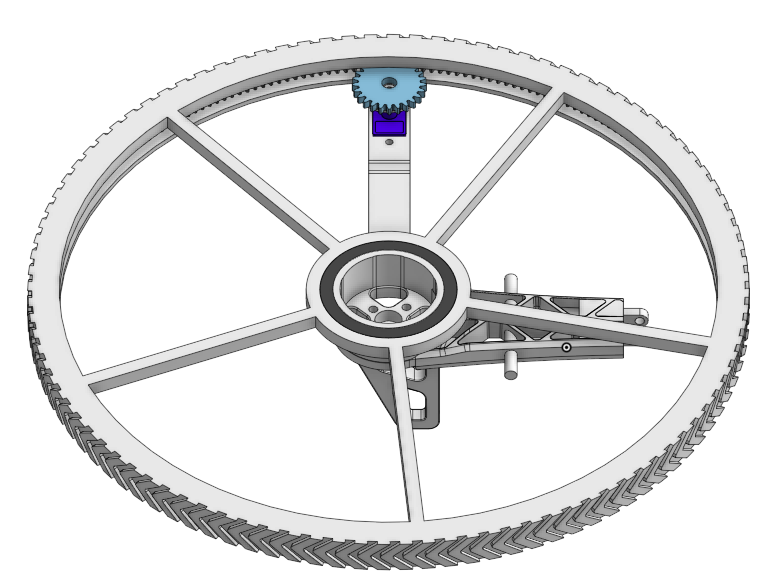
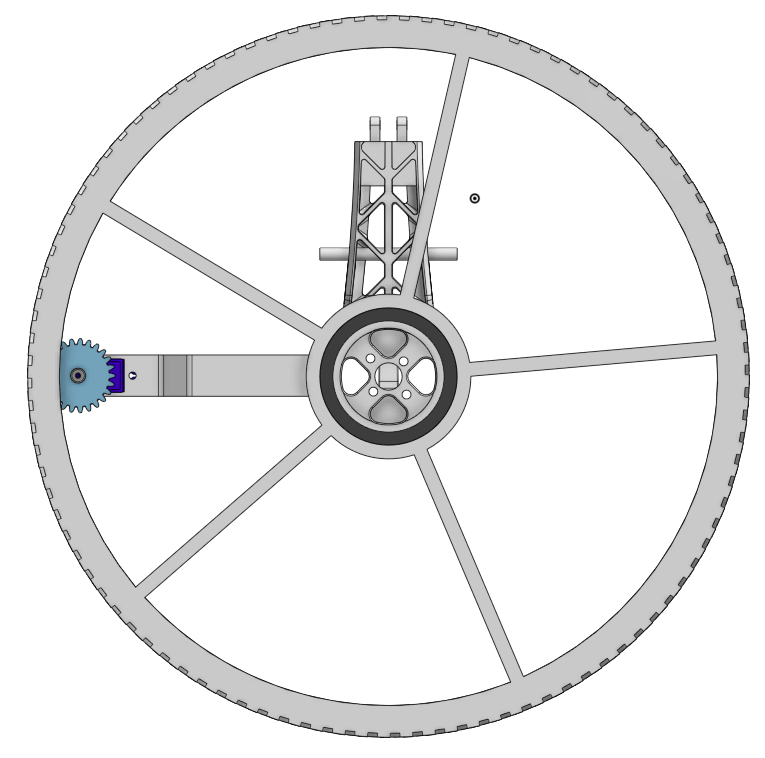
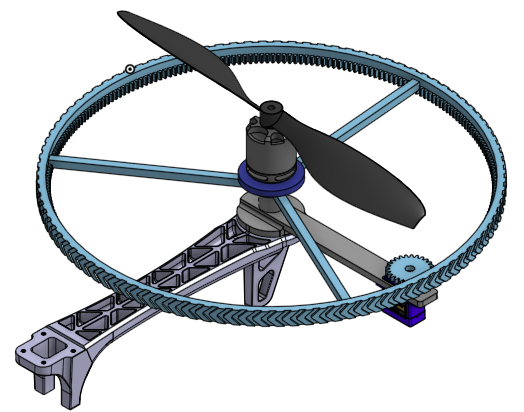
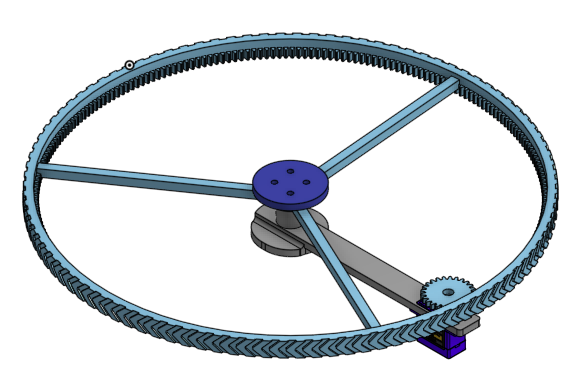
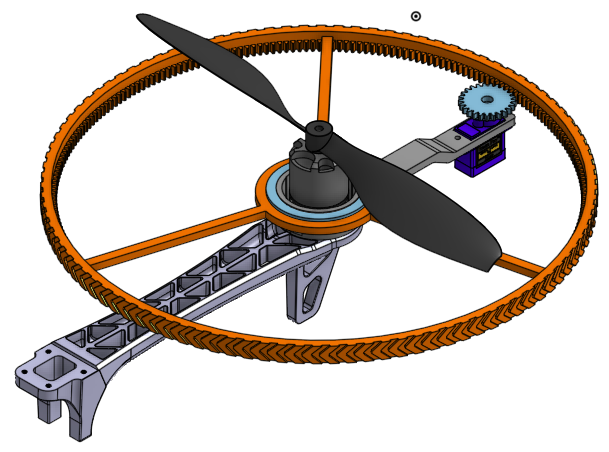
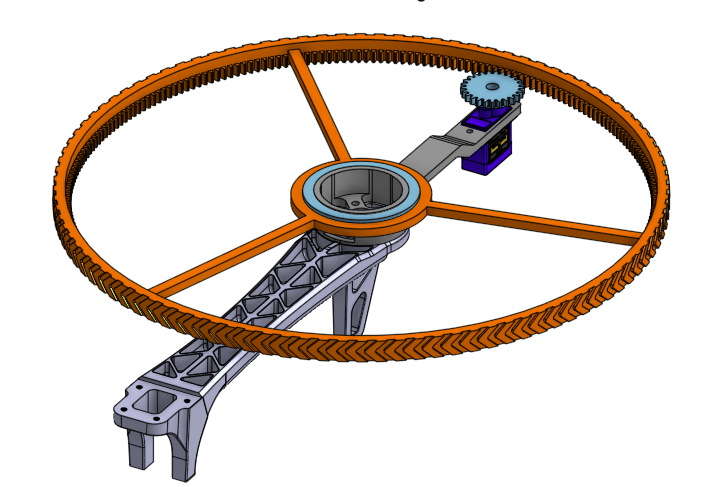
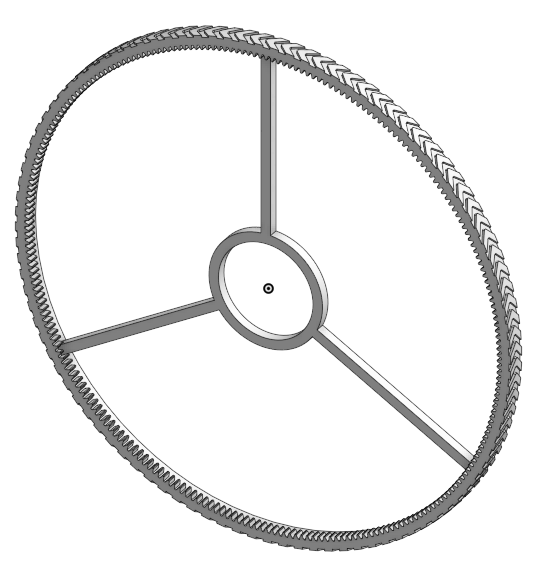
Planetary Gear-like system for wheels
Design Iterations
These are some of the iterations I went through before finalizing the design.
Conceptual Hinge Mechanism
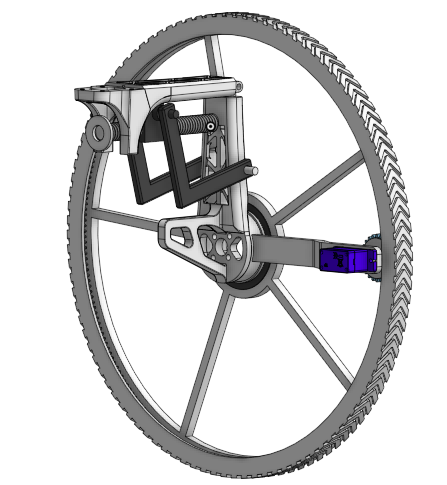
Wheel Assembly
I initially mounted the wheel directly on the motor body, but the inertia on the brushless motors was too much and the wheels could not reach a reasonable RPM. This is why I designed a planetary gear-like system to decouple the wheel from the motor.
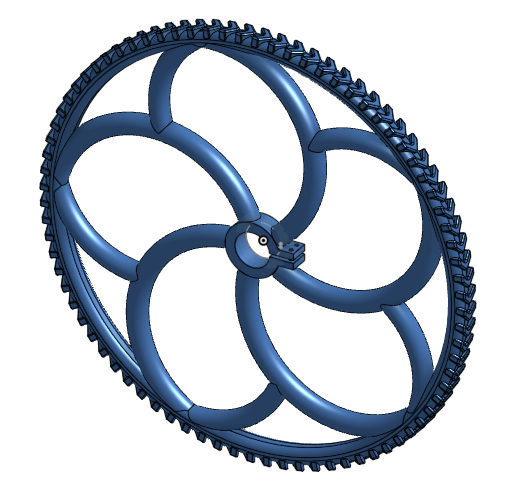
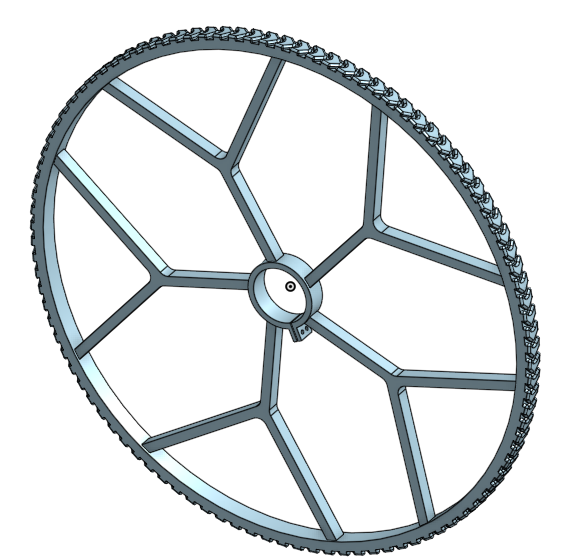
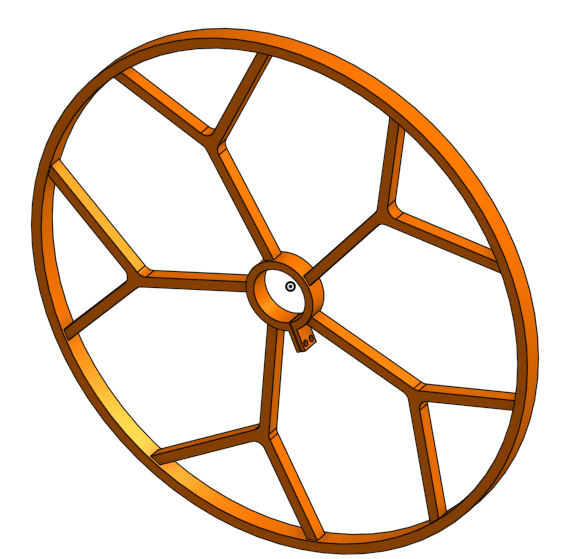
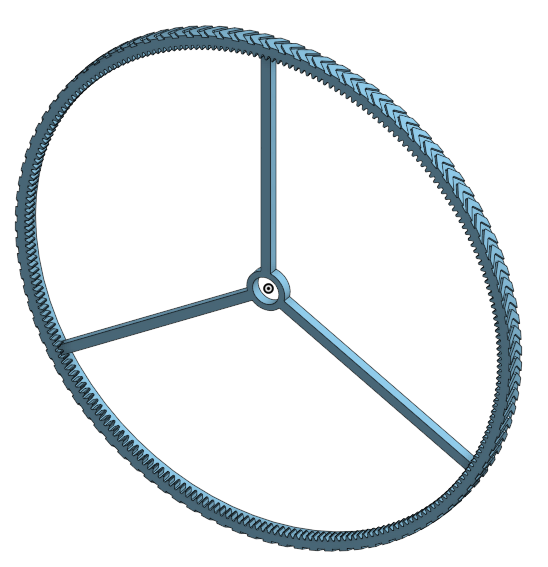
Wheel Design
Flight Testing
I tested the drone with both 3S and 4S batteries. With a 3S, it can carry up to 250g and hover properly, but struggles to gain altitude beyond 366g. Switching to a 4S significantly improved performance, with a payload capacity of up to 750g.