Mrs. Catfisher - The Bug Sorter
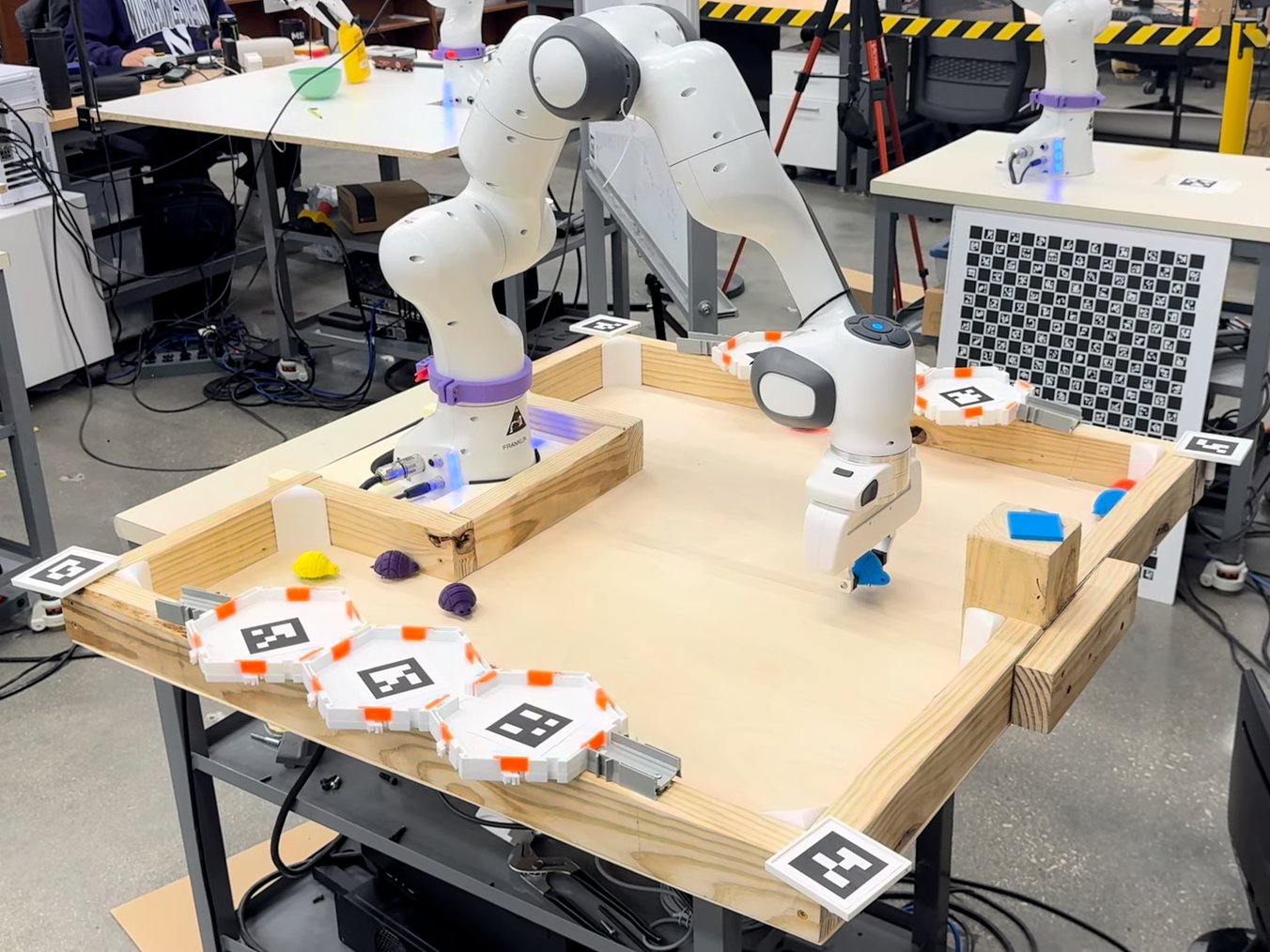
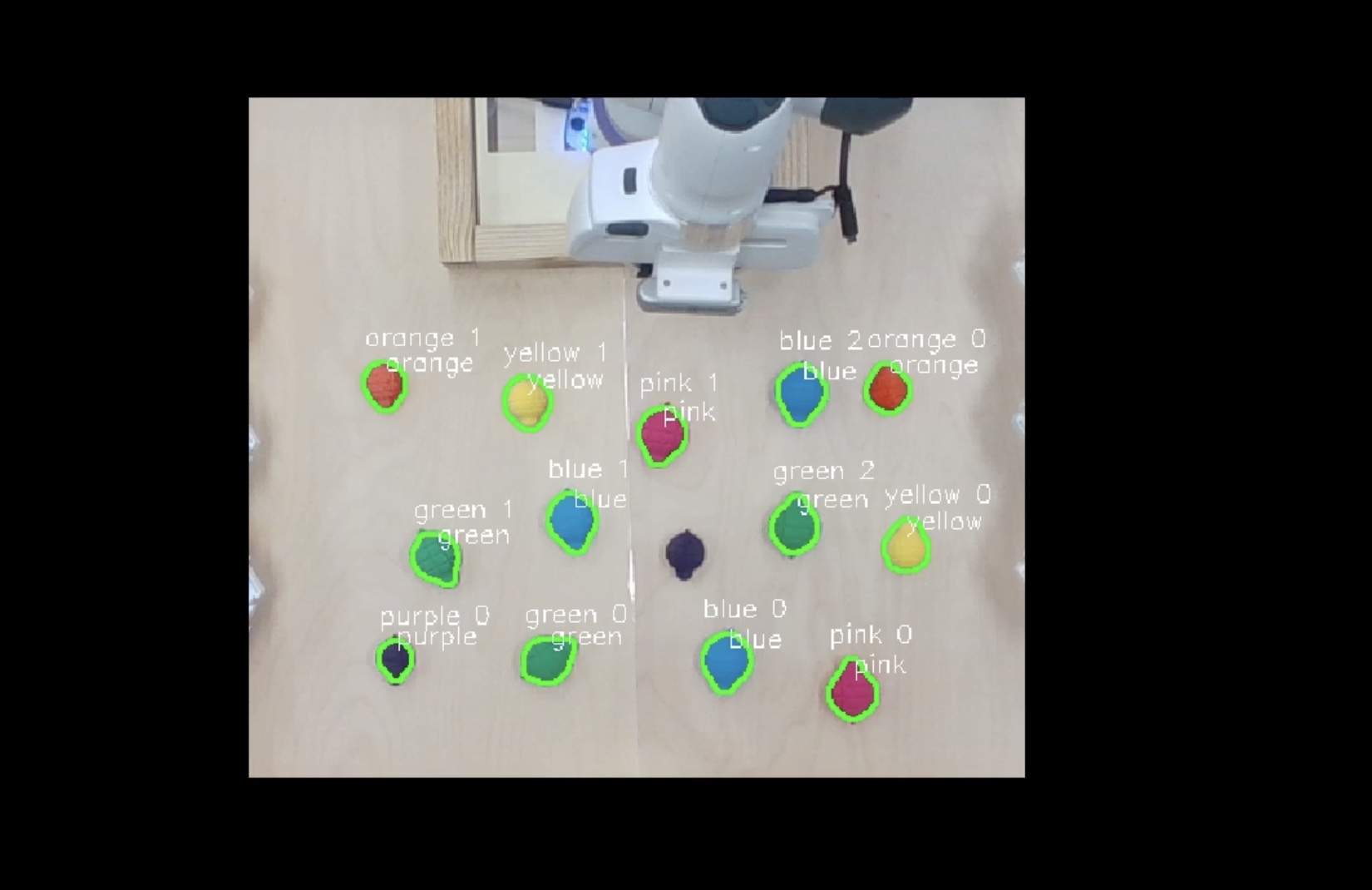
This was a group project by Halley Zhong, Nolan Knight, Miguel, and myself for Northwestern’s MECH_ENG 450: Embedded Systems in Robotics course. We built an autonomous system to sort moving HexBugs using the Franka Arm. My role was to develop the vision system, which can detect, uniquely label, and track the moving bugs in real time.
The robot is controlled through the MotionPlanningInterface, which has three main components:
- RobotState – keeps track of the robot’s current position.
- MotionPlanner – plans safe movements for the robot.
- PlanningScene – monitors obstacles to prevent collisions.
On top of this, the TargetDecision and Sort nodes use the vision system to locate colored bugs, decide which one to pick next, and move it to its designated spot.
Because the HexBugs move in real time, the system can bypass MoveIt and control the robot joints directly using the fer_arm_controller. This allows the Franka Arm to follow moving targets smoothly and efficiently.