Simulating the dynamics of a jack in a shaking box from scratch
Outer Box Frames
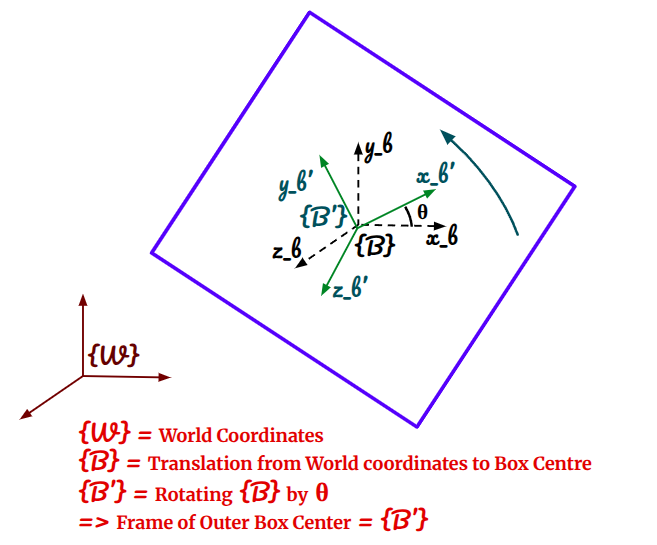
The frame at the center of the outer box is obtained by translating the world frame to the box center and then rotating it by the box orientation $\theta_{\text{box}}$.
Jack Frames
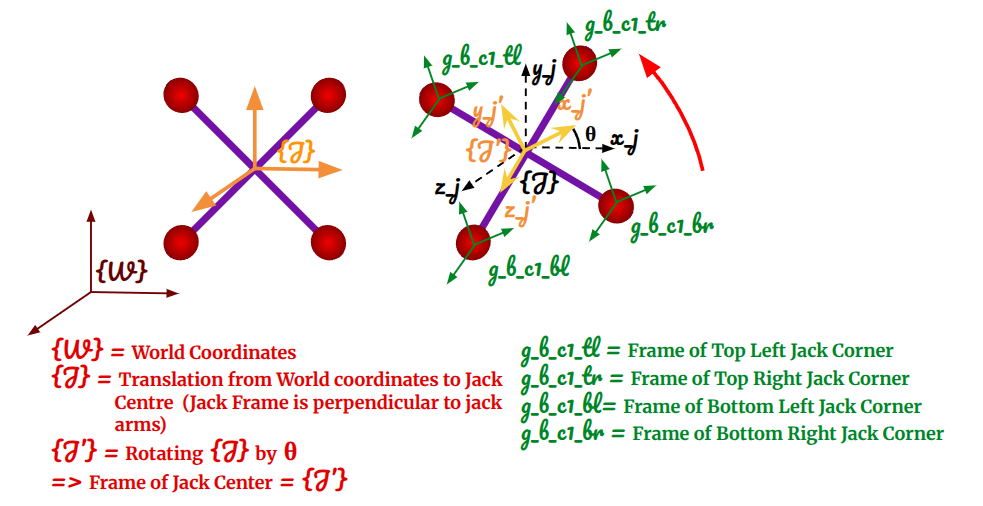
The frame at the center of the jack is obtained by translating the world frame to the jack center and then rotating it by the jack orientation $\theta_{\text{jack}}$. The corner positions are defined relative to the jack center (fixed offsets), rotated by $\theta_{\text{jack}}$, and then expressed in the box frame.
Kinetic Energy and Potential Energy
From the box and jack center frames, I compute the coordinates and their derivatives and use them to calculate kinetic and potential energy.
Kinetic energies are $$T_{\text{box}} = \frac{1}{2} M (\dot{x}^2 + \dot{y}^2) + \frac{1}{2} J \omega^2,$$ $$T_{\text{jack}} = \frac{1}{2} m (\dot{x}^2 + \dot{y}^2) + \frac{1}{2} j \omega^2.$$
and the gravitational potential energies are $$V_{\text{box}} = M g y, \qquad V_{\text{jack}} = m g y,$$ where $y$ is the vertical position of the corresponding center of mass.
System Variables and Euler–Lagrange Equations
The system variables are $[x_{\text{box}}, y_{\text{box}}, \theta_{\text{box}}, x_{\text{jack}}, y_{\text{jack}}, \theta_{\text{jack}}].$
The Lagrangian is defined as the difference between the total kinetic and total potential energy, $$L = T_{\text{box}} + T_{\text{jack}} - (V_{\text{box}} + V_{\text{jack}}).$$
The Euler–Lagrange equation is $$-\frac{\partial L}{\partial q} + \frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}} \right) = F,$$ where $q$ is the vector of system variables and $F$ is the force vector.
Constraints
The motion is constrained so that all jack corners remain inside the outer box:
$$x_{\text{box}} - \frac{L}{2} < x_{\text{corner}} < x_{\text{box}} + \frac{L}{2},$$ $$y_{\text{box}} - \frac{L}{2} < y_{\text{corner}} < y_{\text{box}} + \frac{L}{2}.$$
A ground constraint is also applied so that the box does not move below the floor: $$y_{\text{box}} \geq \frac{L}{2}.$$
External Force and Torque
To make the system move, the box is given a desired angle that changes with time, $$\theta_{\text{desired}}(t) = \frac{\pi}{15} + \frac{\pi}{3} \sin^3\left(\frac{t}{2}\right).$$
A torque is applied to the box that tries to make its actual angle $\theta_{\text{box}}$ follow this desired angle, $$\tau_{\text{box}} = -15,\big(\theta_{\text{desired}} - \theta_{\text{box}}\big).$$
Because the jack is connected to the box, it feels a restoring torque, $$\tau_{\text{jack}} = -\frac{j}{J} , \tau_{\text{box}}.$$
In the vertical direction, the box is given a constant downward force $F_{\text{box}} = M a$, producing a vertical acceleration $a$. A corresponding constant force $F_{\text{jack}} = -m a$ is applied to the jack in the opposite direction, using the same acceleration $a$.
So, the resulting force vector is as follows: $$F = [0, F_{\text{box}}, \tau_{\text{box}}, 0, F_{\text{jack}}, \tau_{\text{jack}}].$$
Active Constraints and Impact
During the simulation, each constraint $\phi_i(q)$ is evaluated at every time step. A constraint is treated as active when $$|\phi_i(q)| < \varepsilon,$$ and inactive constraints use $\lambda_i = 0$.
When an active constraint indicates contact, I resolve a single dominant impact for that time step by enforcing constraint consistency and momentum balance.
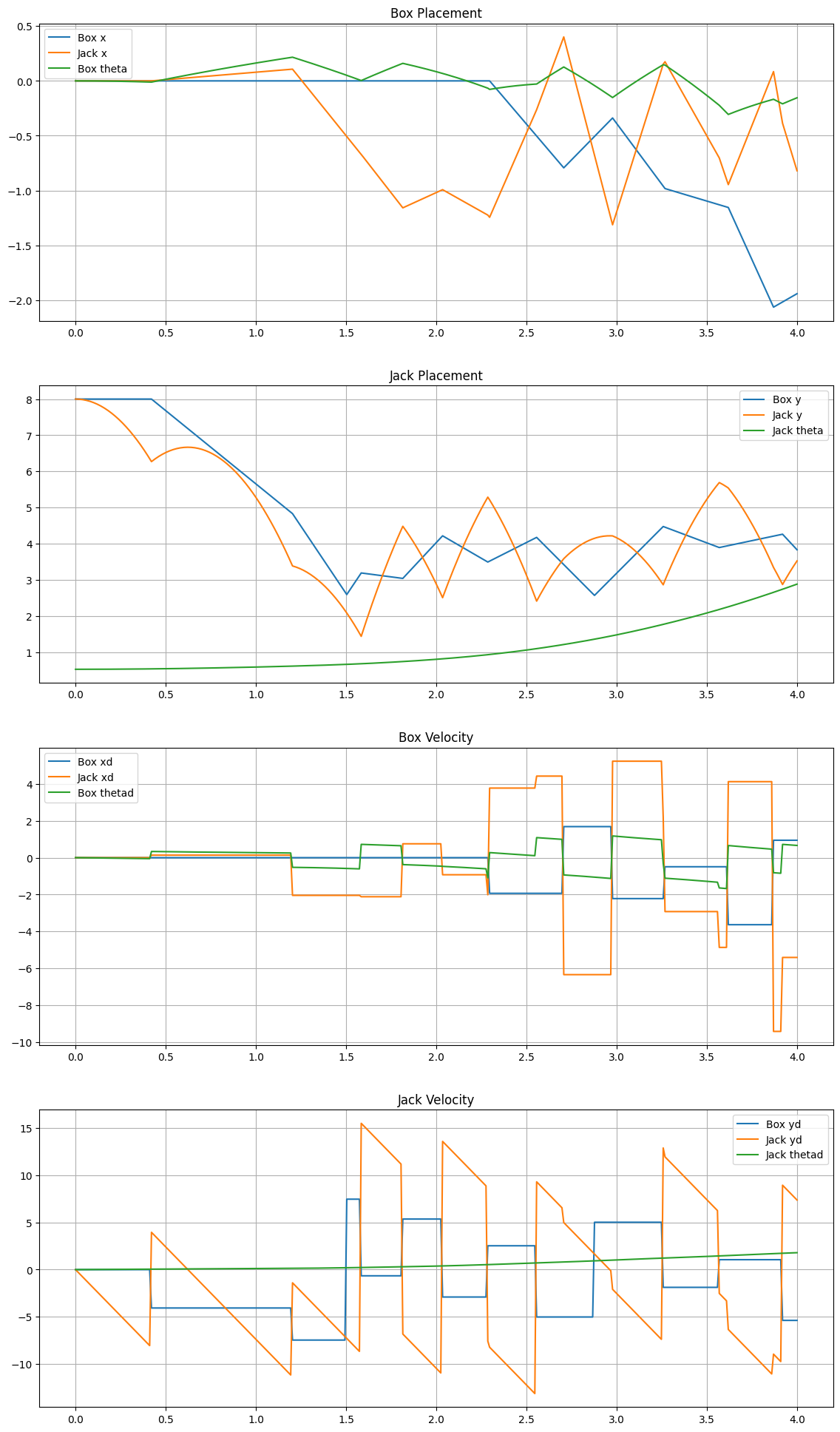
Graphs